
多関節ロボット
2025年4月28日
ロボット操作盤パネル銘板例
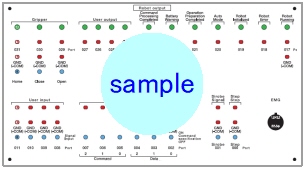
アルミ 220×400 厚1.5 4-φ4.5 黒
「多関節ロボット」というのは、複数の関節(ジョイント)を持つロボットのことを指します。一般的に「ロボットアーム(ロボットマニピュレータ)」をイメージする場合が多いです。
例えば、以下のような特徴があります。
-
**複数の自由度(DOF: Degrees of Freedom)**を持ち、物体の位置や姿勢を柔軟に変えられる
-
人間の腕のように、**回転関節(回転軸)や直動関節(スライド軸)**を組み合わせている
-
産業用ロボットでは、典型的に6軸(6自由度)が主流(例:ファナック、安川電機、ABB、KUKAなどのアーム)
-
作業内容:溶接、組立、塗装、搬送、パレタイジングなど
-
**逆運動学(IK)や順運動学(FK)**という計算理論が重要になる
例
| ロボット名 | 特徴 |
|---|---|
| ファナック M-20iA | 軽量物ハンドリング向け、多関節6軸 |
| 安川電機 MOTOMAN | 幅広いラインナップ、多関節ロボットアーム |
| ユニバーサルロボット URシリーズ | 協働型多関節ロボット、安全設計 |
| <トップページへ> |